Hostoei itsatsitako erle-robotak
Amaia Portugal
Intsektu itxura duten miniaturazko robotak garatzen dihardute Harvarden, baina nahi baino energia gehiago xahutzen dute hegan ari direnean. Arazoa konpontzeko, gailuoi edozein materialen gainean atseden hartzeko aukera ematen dien plataforma ezarri diete. Biomimetikan oinarritu dira, robota bera zein plataforma eraikitzeko.
Bere izenak adierazi bezala, biomimetikak biologia kopiatzen du: naturan dauden diseinu, prozesu eta sistemak hartu, eta horietan oinarritutako teknologia garatzean datza. Belkroa da biomimetikaren adibide klasikoa. Izan ere, George de Mestral ingeniari suitzarrak lapa belarraren fruituen formari erreparatu zion belkroa sortzeko, fruituok bere txakurraren ileari atxikitzen zitzaizkiola eta gero horiek kentzea oso zaila zela ikusita.
Biomimetikaren makina bat adibide daude. Esaterako, Harvard Unibertsitateko (AEB) zenbait ingeniarik hamarkada bete daramate robobee edo erle-robota delako gailua garatzen. Tamaina ez ezik, robotaren hegan egiteko modua ere erleenaren antzekoa da: naturan dauden intsektuengandik ikasi dute ingeniariek, miniaturazko robot hauen hegaldiak ahalik eta eraginkorrenak izan daitezen. Gailu horien aplikazioak askotarikoak izan daitezke etorkizunean: hondamendi naturalen ondorengo bilaketetan lagundu, uzta zaintzeko lanak erraztu… Eta jakina, aplikazio militarrak ere izan ditzake.
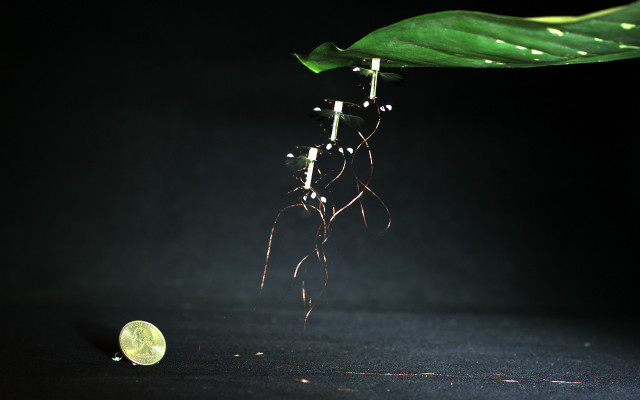
(Argazkia: Harvard Microrobotics Lab / Harvard University / CC BY-NC-ND 3.0)
Robobee delakoak badu oztopo handi bat, ordea. Izan ere, halako gailu batek orduak eta orduak igaro behar ditu hegan, eta hain txikiak izanik, bateria nahi baino azkarrago agortzen zaio. Orain, Harvardeko ingeniariek irtenbide bat aurkitu diote arazo horri, eta horretarako, naturara jo dute berriz ere. Atxikidura elektrostatikoa da irtenbide hori, eta Science aldizkarian eman dute haren berri.
Hegan egiten duten animalia asko pausatu egiten dira energia gordetzeko; saguzarra da adibide deigarriena, akaso, buruz behera esekitzen delako. Funtsean, portaera hori kopiatzea da gakoa, baina Kevin Ma Harvardeko ikertzaileak eta artikuluaren egileetako batek adierazi bezala, “animaliok pausatzeko erabiltzen dituzten metodoak (batzuek itsasgarriak dauzkate, beste batzuek atzaparrak baliatzen dituzte zerbaiti helduta eusteko) ez dira aproposak halako robot txikientzat, horretarako mugitzen diren ataldun sistemak behar direlako, edo bestela, atxikita egoteari utzi behar zaionean, askatzeko indar handia”.
Robobee gailuaren funtzionamendua erakusten duen bideoa.
Baina animalia batzuk ez ezik, adibidez, puzgarriak ere atxikitzen zaizkie hormei. Atxikidura elektrostatikoari esker gertatzen da hori, eta metodo hori bada baliagarria robot txiki hauentzat. Hori horrela, ikertzaileek karga elektrostatikoa duen plataforma moduko bat ezarri diote robotari goialdean. Horri esker, plataformak ahalmena izango luke askotariko materialetan itsatsita geratzeko. Horrek esan nahi du, esaterako, gailua soro baten gainean lanean ariko balitz, hosto bati atxikita geratzeko aukera izango lukeela plataforma itsaskorraren bidez, eta airean segiko luke, baina energiarik xahutu gabe. Hostotik atzera askatzeko, berriz, aski litzateke plataformak duen karga etetea.
Sistema honen bidez pausatuta egon daiteke robota, eta pausatuta baliatzen duen energia kopurua mila aldiz txikiagoa da, airean geldirik egonda behar duena baino. Gailuaren bizitza nabarmen handitzen du horrek. Gainera, Moritz Graule artikuluaren egile nagusiak erantsi bezala, “sistema honek duen abantaila handienetakoa zera da, gailuak askatu behar duenean, ez dela desoreka mugimendurik sortzen, eta hori funtsezkoa da gurea bezalako robot txiki eta hauskor batentzat”.
Erreferentzia bibliografikoa:
Perching and takeoff of a robotic insect on overhangs using switchable electrostatic adhesion. M.A. Graule et al. Science 20 May 2016. Vol. 352, Issue 6288, pp 978-982. doi:10.1126/science.aaf1092
Egileaz: Amaia Portugal (@amaiaportugal) zientzia kazetaria da.