Indar eremuak edonon!
Gorka Azkune
XIX. mendean Michael Faraday eta James Clerk Maxwell fisikarien lanetan indar-eremuen kontzeptua agertu zen lehenbizikoz. Indar-eremuen kontzeptua, garai haietan aurkitzen ari ziren fenomeno elektromagnetikoak behar bezala azaltzeko jaio zen, baina urteen poderioz fisikaren alor askotara hedatu da. Betiko eremu elektrikoaz eta grabitatorioaz gain, gaur egun Higgs-en eremua ere aski ezaguna bilakatu da, Nobel sari bat tarteko. Azken hori ez da indar-eremu bat, baina eremuaren kontzeptua jarraitzen du.
Beraz, badirudi nahiko garbi dugula gure Unibertsoa eremuz josita dagoela han eta hemen. Baina zer esango zenuke indar-eremu artifizialei buruz hitz egingo bagenu? Zertarako behar ote dira bada eremu artifizialak “benetazko” hainbeste eremu izanda? Harrigarria badirudi ere, indar-eremu artifizialak robotikan erabilitzen dira.
Oztopoak ekiditen
Robot batek ez du asko balio mugitzeko gai ez bada. Mugimendua baita robot batek duen modua bere ingurunea aldatzeko. Bai beso robotiko batek zein gurpildun robot batek, mugitzeko ahalmena behar dute. Eta noski, mugimendu horiek ezin dira edonolakoak izan. Beso robotiko batekin edalontzi bat hartu nahi badugu, besoak edalontziruntz mugitu behar du inguruko bestelako oztopo denak ekidinez. Kasu horretan oztopoen papera, pertsonek, altzariek, hormek edo inguruneko bestelako gauzek izan dezakete. Antzeko zerbait esan genezake gurpildun robot baten inguruan. Helmuga bat izango du eta ekidin beharreko oztopo batzuk.
Robotikan, modu horretako mugimendua sortzeari bide-planifikazioa deritzo. Arazo hori izan zen beharbada robotikaren hastapenetan esfortzu gehien batu zituena. Denetariko konponbideak ikusi ditugu, baina gaur, horietako batean zentratuko gara, fisikan sorturiko kontzeptu bat modu oso dotorean erabiltzen baitu.
1986. urtean, Oussama Khatib ikertzaile siriarrak lehen aldiz indar-eremu artifizialak erabili zituen bide-planifikazioaren arazoa konpontzeko. Bere ideia, ikusi ondoren, oso sinplea da: sor dezagun robotaren inguruan indar-eremu artifizial bat, non oztopoek aldarapen indarrak eta helmugak erakarpen indarrak sortzen baitituzten. Modu horretara, robota indar-eremu batean libre mugitzen den partikula baten antzerakoa litzateke.
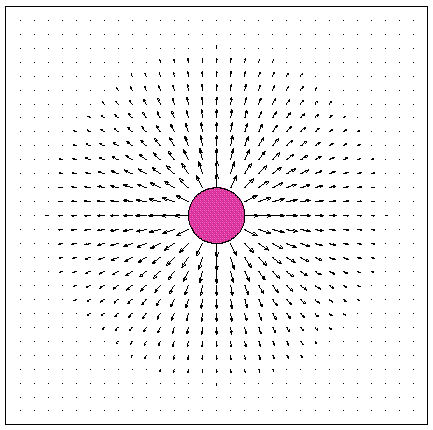
Khatib-en ideiaren arabera oztopo batek ondorengo indar-eremua sortuko luke espazioaren puntu guztietan:
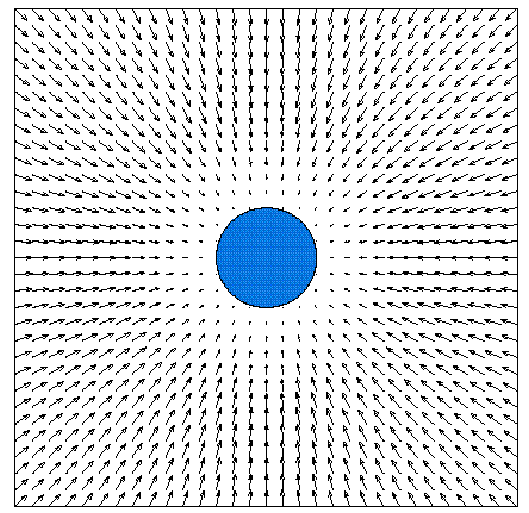
Bestalde, helmugak erakarpen indarra izango luke eta berak sortutako eremuaren itxura horrelakoa litzateke:
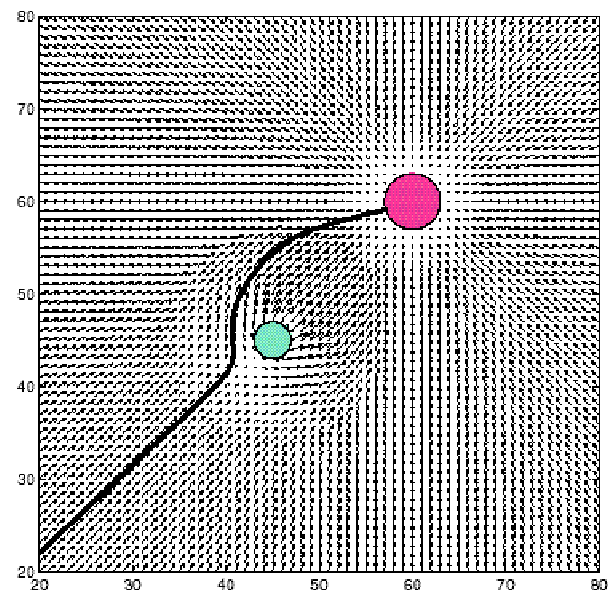
Demagun gurpildun robot bat dugula eta bere ingurunean oztopo bat jarri diogula. Helmuga konkretu batera joateko esaten badiogu, egin behar duen lehenbiziko gauza espazioko puntu bakoitzean izango duen indar bektorea kalkulatzea da. Hori oso sinplea da, bektoreak gehitu besterik ez baitira egin behar, eskolan erakutsi diguten bezala. Emaitza gisa, horrelako zerbait eduki genezake:
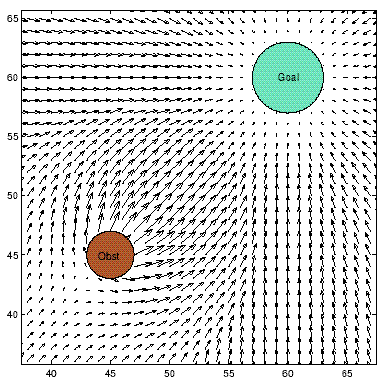
Irudian, helburu-posizioa ingelerazko Goal hitzak errepresentatzen du eta bestalde, Obst izeneko bolatxoak oztopo baten lanak egiten ditu. Ikusten den bezala, indar-eremuak oztopotik aldentzen du robota eta helmugarantz erakarri. Gure gurpildun robota behekaldeko ezker txokoan dagoela suposatuz, kalkulatutako bideak horrelako itxura izango luke:
Ez al da harrigarria? Fisikaren esparruan agertu den ideia bat erabili aha izan dugu robot batek bere bidea topa dezan oztopoz betetako ingurune batean. Ez da makala!
Abantailak eta desabantailak
Gorago esan dugun bezala, bide-planifikazioaren arazoarentzat beste hainbat konponbide aurkeztu ziren garai haietan ere. Gehienak ordea oso konponbide makalak ziren. Ingurune osoa esploratzen zuten biderik laburrena topatu ahal izateko, eta garai hartako ordenagailuen gaitasun urria medio, oso prozesu makalak ziren. Khatib-en indar eremu artifizialen teknikaren meritu handiena azkartasuna eta sinpletasuna izan ziren. Kalkulu gutxi eginda robotak bere bidea topatzen zuen helmugara oztopoak behar bezala ekidinez.
Baina noski, teknika horrek ere baditu bere alderdi ilunak. Ezagunenen artean minimo lokalen arazoa dugu. Arazo hori ulertzeko oso erraza da eta indar-eremu naturaletan ematen da, potentzial putzu izenpean. Demagun gure ingurunea modu honetakoa dela:
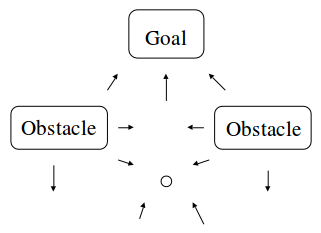
Borobiltxoa gure robota den bitartean, Obstacle izeneko kaxek oztopoak errepresentatzen dituzte. Goal kaxa, beste behin, robotak joan nahi duen helmuga da. Marraztu ditugun geziek erakusten duten moduan, robota harrapatuta geratu da. Indarrek elkar anulatzen duten puntu batera iritsi da eta hortik ezin izango da irten sekula. Puntu horiei minimo lokalak deitzen zaie. Kasu honetan, robotak bidea libre du helmugaraino bi oztopoen artetik pasatzen bada, baina aldarapenezko eta erakarpenezko eremuek elkar anulatzen dute. Argi dagoenez, indar-eremu artifizialen teknikak huts egiten du kasu horietan.
Arazo gehiago daude oraindik. Denak banan-banan ikustea ordea ez da gure helburua gaurkoan. Indar-eremu artifizialen teknikak gaur egun ez dira apenas erabiltzen, bestelako teknika landuagoak baitaude eskura. Baina bere momentuan oso paper garrantzitsua izan zuten robotikaren munduan. Bide-planifikazioaren arazoa modu sinple eta dotorean konpotzeaz gain, denbora gutxian exekuta zitekeen teknika bat zen. Eta hori, garai haietan, meritu handiko kontua zen.
Bukatzeko, bideo bat ikusiko dugu. Bertan, simulatutako robot bat ageri da oztopoz betetako ingurune batean. Momentu oro ikusten da robotaren helmugak sorrarazten duen indar bektorea, baita oztopoen ondorioz sortzen diren aldarapen indarrak ere. Bukaeran, helmugara iristen denean, robotak beso simulatu bat ateratzen du. Besoaren kontrola ere indar-eremu artifizialen teknika erabiliz egiten da.
Erreferentziak
Khatib, O., “Real-Time Obstacle Avoidance for Manipulators and Mobile Robots.” 1985 IEEE International Conference on Robotics and Automation, St. Louis, Missouri, March 25-28, 1990, pp. 500-505.
Borenstein, J. and Koren, Y., “Real-time Obstacle Avoidance for Fast Mobile Robots in Cluttered Environments.” The 1990 IEEE International Conference on Robotics and Automation, Cincinnati, Ohio, May 13-18, 1990, pp. 572-577.
Tilove, R. B., “Local Obstacle Avoidance for Mobile Robots Based on the Method of Artificial Potentials.” General Motors Research Laboratories, Research Publication GMR-6650, September 1989.
Koren, Y., & Borenstein, J. (1991, April). Potential field methods and their inherent limitations for mobile robot navigation. In Robotics and Automation, 1991. Proceedings., 1991 IEEE International Conference on (pp. 1398-1404). IEEE.
Egileaz: Gorka Azkune (@gazkune), informatikaria, eta DeustoTech-eko ikertzailea da.

Sarrera honek #KulturaZientifikoa 1. Jaialdian parte hartzen du.
1 iruzkina
[…] (Z=32): “Indar eremuak edonon!“. DeustoTech-eko ikertzailea den Gorka Azkunek Robotika ekarri zigun Jaialdira. Robotei […]