Tokian tokiko jarduera: kirurgian laguntzen duten robotak
Automatizazioa etorkizuna zen orain dela 50 urte. Robotizatzea hain da etorkizun hurbila, oraina baita. Eta giza jardueraren arlo guztiak robotizatzea, dirudienez, joera geldiezina da. Baina ez dugu zertan robot guztiz autonomoetan pentsatu behar, Isaac Asimoven 1950eko izen bereko liburuan oinarritutako Yo Robot (Alex Proyas, 2004) filmekoak bezalakoetan.
Laguntzaile gisa integratuko dira robotak gure eguneroko ekintzetan. Horren adierazgarri dira, adibidez, oso tentuz egin beharreko ebakuntza kirurgikoetan laguntzaile gisa baliatzen diren robotak.

Demagun bizkarrezurreko ebakuntza bat egin behar dugula, baina ez dugula nahi ebakuntza hori apenas inbaditzailea izatea. Oso modu sinplean esateko, halako ebakuntzetan erabateko zehaztasunez jakin behar da torlojuak non jarri ahalik eta eraginkorrenak izan daitezen, eta ziur egon behar da orno muina ukitzen denean konpondu nahi dena baino kalte handiagorik ez dela eragingo.
CEIT eta Egile erakundeak lankidetzan ari dira ELCANO proiektuan; mota horretako ebakuntzetarako irtenbide integratu eta robotizatu bat garatzeko jomuga du, hain zuzen, ELCANO proiektuak. Kirurgiaren arduraduna da ebakuntza erabakitzen eta egiten duena; robotak kalkuluetan lagunduko dio, eta kalteak sor daitezen eragozteko ere baliagarria izango zaio. Laguntza hori hiru arlotan gauzatzen da; lehen biak dira hirugarrena –hots, robotaren jarduketa– ahalbidetzen dutenak:
- ebakuntzaren plangintza birtuala,
- nabigazio sistema edo trackinga,
- laguntzaile robotizatua (COBOT).
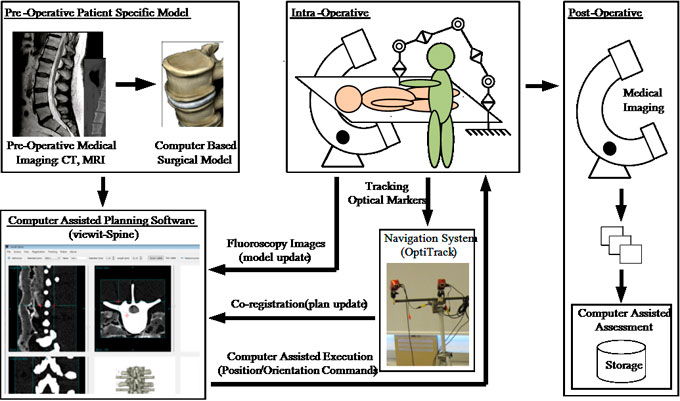
Ebakuntzaren plangintza birtuala*
Ospitaleek irudi bidezko komunikazio eta artxibatze sistema bat izan ohi dute (PACS, ingelesezko sigletan). Sistema horren funtzio nagusia irudiak gordetzea eta ospitaleko zerbitzuen arteko komunikazioa erraztea da. PACS sistema perfektuak irudiaren ibilbide osoari erantzun behar dio: atzematea, diagnostikoa, txostena egiteko prozesua eta monitorizazioa.
Ebakuntza baino lehen*, plangintza software batek (viewIT-spine) pazientearen historian bildutako informazioa erauzten du PACS sistematik, eta pazientearen eredu birtual bat taxutzen du, eskuragarri dauden TACeko irudietan oinarrituta. Horrekin zirujauak ebakuntzaren plangintza egin dezake, bere bulegotik pazienteari sartu nahi dizkion torlojuen posizioa eta orientazioa zehaztuta. Behin bukatu ondoren, plangintza ebakuntza gelara igortzen da.
Nabigazio sistema/trackinga
Ebakuntza gelan instalaturiko gailu batek denbora errealean monitoriza dezake pazientearen posizio erreala, eta, hala, korrelazio bat sortzen du paziente errealaren jarreraren eta planifikatzailearekin taxututako eredu birtualaren artean. Horretarako, viewIT-spine softwarearen modulu bat denbora errealean exekutatzen da ebakuntza gelan.

Laguntzaile robotizatua (COBOT)
COBOT sistema robotiko bat da, planifikatzailearen informazioa jasotzeko gai dena. Robot hori gai da mugimenduaren murrizte aktibo batzuk taxutzeko eta zirujauarekin elkarlanean aritzeko (COllaborative roBOT), ebakuntza errazte aldera. Horrekin batera, mugimendu murrizketek zirujauaren mugimenduak mugatzen ditu, arrisku zonak ez ukitzeko.
* Profesionalentzako oharra:
Torloju transpedikularrak erabiliz egindako lotura ebakuntzak. Kontzeptua bestelako ebakuntzetarako ere aplikagarria da, hala nola alde batetik egindako artrodesi intersomatikorako (ALIF edo TLIF).
Egileaz:
Cesár Tomé López (@EDocet) zientzia dibulgatzailea da eta Mapping Ignorance eta Cuaderno de Cultura Cientifica blogen editorea.
Itzulpena: UPV/EHUko Euskara Zerbitzua.